Klassische Differentialoperatoren
Definition und erste Beispiele
Es sei \( n\in\mathbb N \) eine natürliche Zahl.
Beispiele: Nachfolgend sind die zweidimensionalen Vektorfelder \[ f(x,y)=(x,y)\quad\text{und}\quad f(x,y)=(-y,x) \] für \( (x,y)\in\mathbb R^2 \) skizziert.
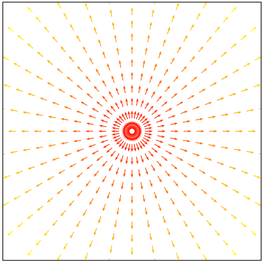
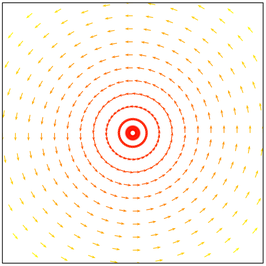
Dazu setzen wir in jedem Punkt \( (x,y)\in\mathbb R^2 \) den zugehörigen Vektor \( f(x,y) \) an. Zur Verdeutlichung der Größe des Betrages \( |f(x,y)| \) haben wir aus Anschauungsgründen unterschiedliche Farben verwendet.
Beispiel: Die Divergenz des Vektorfeldes \( f(x,y,z)=(-y,xy,3z+x) \) im \( \mathbb R^3 \) berechnet sich zu \[ \text{div}\,f(x,y,z)=0+x+3=3+x,\quad(x,y,z)\in\mathbb R^3\,. \]
Die Divergenz können wir auch als die Spur der Jacobimatrix \( \partial f(x) \) schreiben \[ \text{div}\,f(x) =\text{Spur}\,\partial f(x) =\text{Spur}\left(\begin{array}{ccc} f_{1,x_1} & \cdots & f_{1,x_n} \\ \vdots & & \vdots \\ f_{n,x_1} & \cdots & f_{n,x_n} \end{array}\right) =\sum_{i=1}^n\frac{\partial f_i(x)}{\partial x_i}\,. \]
Auf der offenen Menge \( \Omega\subseteq\mathbb R^n \) sei \( f\colon\Omega\to\mathbb R^n \) ein differenzierbares Vektorfeld. Einen Punkt \( x\in\Omega \) bezeichnen wir als
| \( \circ \) | Quelle, falls \( \text{div}\,f(x)\gt 0, \) |
| \( \circ \) | Senke, falls \( \text{div}\,f(x)\lt 0, \) |
| \( \circ \) | quellenfrei, falls \( \text{div}\,f(x)=0. \) |
Folgende Skizze veranschaulichen diese Bezeichnungen:
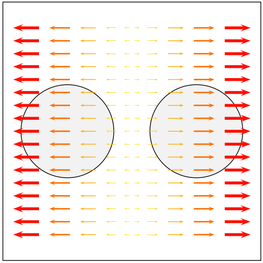
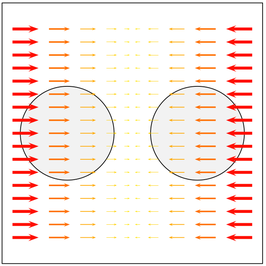
Links ist das ebene Vektorfeld \( (x,0) \) skizziert mit der Divergenz \( 1, \) d.h. jeder Punkt ist eine Quelle, rechts das Vektorfeld \( (-x,0) \) mit der Divergenz \( -1, \) und hier ist jeder Punkt eine Senke. Die unterschiedlich gefärbten (die Farbgebung ist invers zur Farbgebung im vorigen Paragraphen gewählt) und unterschiedlich dick gezeichneten Pfeile der Felder veranschaulichen diese beiden charakteristischen Eigenschaften.
Achten Sie im Folgenden auf die Dimension \( n=3. \)
Wir vereinbaren folgende Sprechweise:
| \( \circ \) | Ein Vektorfeld heißt wirbelfrei, falls dessen Rotation identisch verschwindet. Andernfalls heißt es ein Wirbelfeld. |
Beispiel: Die Rotation des Vektorfeldes \( f(x,y,z)=(-y,xy,3z+x) \) im \( \mathbb R^3 \) berechnet sich zu \[ \text{rot}\,f(x,y,z)=(0,-1,y+1),\quad(x,y,z)\in\mathbb R^3\,. \]
Laplaceoperator und harmonische Funktionen
Wir benötigen an dieser Stelle den bereits bekannten Gradienten \[ \nabla f(x)\equiv\text{grad}\,f(x)=\left(\frac{\partial f(x)}{\partial x_1}\,,\ldots,\frac{\partial f(x)}{\partial x_n}\right) \] für differenzierbare Funktionen \( f\colon\mathbb R^n\to\mathbb R. \)
Der Laplaceoperator spielt in der Theorie der partiellen Differentialgleichungen zweiter Ordnung eine besonders wesentliche Rolle. Die einfachste Gleichung dieser Art ist die Laplacegleichung \[ \Delta f(x)=0\quad\mbox{in}\ \Omega. \] Eine Funktion, die dieser Gleichung genügt, heißt harmonisch.
Linearität von Gradient, Divergenz und Rotation
Wir beweisen den
| (i) | Sind \( f,g\colon\Omega\to\mathbb R \) partiell differenzierbar und \( \lambda,\mu\in\mathbb R, \) so gilt |
| (ii) | Sind \( f,g\colon\Omega\to\mathbb R^n \) partiell differenzierbar und \( \lambda,\mu\in\mathbb R, \) so gilt |
| (iii) | Sind \( f,g\colon\Omega\to\mathbb R^3 \) partiell differenzierbar und \( \lambda,\mu\in\mathbb R, \) so gilt |
Beweis
| (i) | Wir berechnen |
\[ \begin{array}{lll} \text{grad}\,(\lambda f+\mu g)\!\!\! & = & \displaystyle\!\!\! ((\lambda f+\mu g)_{x_1},\ldots,(\lambda f+\mu g)_{x_n}) \\[0.6ex] & = & \displaystyle\!\!\! (\lambda f_{x_1}+\mu g_{x_1},\ldots,\lambda f_{x_n}+\mu g_{x_n}) \\[0.6ex] & = & \displaystyle\!\!\! \lambda(f_{x_1},\ldots,f_{x_n})+\mu(g_{x_1},\ldots,g_{x_n}) \\[0.6ex] & = & \displaystyle \lambda\,\text{grad}\,f+\mu\,\text{grad}\,g, \end{array} \]
| und das zeigt (i). | |
| (ii) | Wir berechnen |
\[ \begin{array}{lll} \text{div}\,(\lambda f+\mu g)\!\!\! & = & \displaystyle\!\!\! \sum_{i=1}^n\frac{\partial}{\partial x_i}\,(\lambda f+\mu g)_i \,=\,\sum_{i=1}^n\left\{\lambda\,\frac{\partial f_i}{\partial x_i}+\mu\,\frac{\partial f_i}{\partial x_i}\right\} \\[1.6ex] & = & \displaystyle\!\!\! \lambda\,\sum_{i=1}^n\frac{\partial f_i}{\partial x_i}+\mu\,\sum_{i=1}^n\frac{\partial g_i}{\partial x_i} \,=\,\lambda\,\text{div}\,f+\mu\,\text{div}\,g, \end{array} \]
| und das zeigt (ii). | |
| (iii) | Wir ermitteln für die einzelnen Komponenten der Rotation |
\[ \begin{array}{l} (\lambda f_3+\mu g_3)_{x_2}-(\lambda f_2+\mu g_2)_{x_3}=\lambda(f_{3,x_2}-f_{2,x_3})+\mu(g_{3,x_2}-g_{2,x_3}), \\[0.6ex] (\lambda f_1+\mu g_1)_{x_3}-(\lambda f_3+\mu g_3)_{x_1}=\lambda(f_{1,x_3}-f_{3,x_1})+\mu(g_{1,x_3}-g_{3,x_1}), \\[0.6ex] (\lambda f_2+\mu g_2)_{x_1}-(\lambda f_1+\mu g_1)_{x_2}=\lambda(f_{2,x_1}-f_{1,x_2})+\mu(g_{2,x_1}-g_{1,x_2}). \end{array} \]
| Zusammenfassend ergibt sich |
\[ \begin{array}{lll} \displaystyle \text{rot}\,(\lambda f+\mu g)\!\!\! & = & \displaystyle\!\!\! \lambda(f_{3,x_2}-f_{2,x_3},f_{1,x_3}-f_{3,x_1},f_{2,x_1}-f_{1,x_2}) \\[0.6ex] & & \displaystyle\!\!\! +\,\mu(g_{3,x_2}-g_{2,x_3},g_{1,x_3}-g_{3,x_1},g_{2,x_1}-g_{1,x_2}) \\[0.6ex] & = & \displaystyle\!\!\! \lambda\,\text{rot}\,f+\mu\,\text{rot}\,g. \end{array} \]
| und das zeigt (iii). |
Damit ist alle bewiesen.\( \qquad\Box \)
Wiederholte Anwendung von Divergenz und Rotation
Für spätere Anwendungen notieren wir den
| (i) | \( \text{rot}\,\text{grad}\,f=0. \) |
Ist \( f\colon\Omega\to\mathbb R^3 \) zweimal stetig partiell differenzierbar, so gelten in \( \Omega \)
| (ii) | \( \text{div}\,\text{rot}\,f=0, \) |
| (iii) | \( \text{rot}\,\text{rot}\,f=\text{grad}\,\text{div}\,f-\triangle f \) mit \( \triangle f:=(\triangle f_1,\triangle f_2,\triangle f_3). \) |
Beweis
| (i) | Wir berechnen zunächst |
\[ \begin{array}{lll} \text{rot}\,\text{grad}\,f\!\!\! & = & \displaystyle\!\!\! \text{rot}\,(f_{x_1},f_{x_2},f_{x_3}) \\[0.6ex] & = & \displaystyle\!\!\! f_{x_3x_2}-f_{x_2x_3}+f_{x_1x_3}-f_{x_3x_1}+f_{x_2x_1}-f_{x_1x_2} \\[0.6ex] & = & \displaystyle\!\!\! (0,0,0) \end{array} \]
| da nach dem Satz von Schwarz die gemischten zweiten Ableitungen jeweils verschwinden. Es folgt (i). | |
| (ii) | Wir berechnen |
\[ \begin{array}{lll} \text{div}\,\text{rot}\,f\!\!\! & = & \displaystyle\!\!\! \text{div}\,(f_{3,x_2}-f_{2,x_3},f_{1,x_3}-f_{3,x_1},f_{2,x_1}-f_{1,x_2}) \\[0.6ex] & = & \displaystyle\!\!\! (f_{3,x_2}-f_{2,x_3})_{x_1}+(f_{1,x_3}-f_{3,x_1})_{x_2}+(f_{2,x_1}-f_{1,x_2})_{x_3} \\[0.6ex] & = & \displaystyle\!\!\! f_{3,x_2x_1}-f_{2,x_3x_1}+f_{1,x_3x_2}-f_{3,x_1x_2}+f_{2,x_1x_3}-f_{1,x_2x_3}\,. \end{array} \]
| Die gemischten zweiten Ableitungen der Koeffizientenfunktion \( f_i \) verschwinden identisch nach dem Satz von Schwarz, was (ii) zeigt. | |
| (iii) | Für die erste Komponente des Vektors \( \text{rot}\,\text{rot}\,f \) berechnen wir |
\[ \begin{array}{lll} (\text{rot}\,\text{rot}\,f)_1\!\!\! & = & \displaystyle\!\!\! f_{2,x_1x_2}-f_{1,x_2x_2}-f_{1,x_3x_3}+f_{3,x_1x_3} \\[0.6ex] & = & \displaystyle\!\!\! (f_{2,x_2x_1}+f_{3,x_3x_1})-(f_{1,x_2x_2}+f_{1,x_3x_3}) \\[0.6ex] & = & \displaystyle\!\!\! (f_{1,x_1x_1}+f_{2,x_2x_1}+f_{3,x_3x_1})-(f_{1,x_1x_1}+f_{1,x_2x_2}+f_{1,x_3x_3}) \\[0.6ex] & = & \displaystyle\!\!\! (f_{1,x_1}+f_{2,x_2}+f_{3,x_3})_{x_1}-\triangle f_1 \\[0.6ex] & = & \displaystyle\!\!\! (\text{grad}\,\text{div}\,f)_1-\triangle f_1\,, \end{array} \]
| und analog folgen für die zweite und die dritte Komponente |
\[ \begin{array}{lll} (\text{rot}\,\text{rot}\,f)_2\!\!\! & = & \displaystyle\!\!\! (\text{grad}\,\text{div}\,f)_2-\triangle f_2\,, \\[0.6ex] (\text{rot}\,\text{rot}\,f)_3\!\!\! & = & \displaystyle\!\!\! (\text{grad}\,\text{div}\,f)_3-\triangle f_3\,. \end{array} \]
| Zusammenfassen zeigt (iii). |
Damit ist alle bewiesen.\( \qquad\Box \)